Le lien pour le réglement, c'est par ici :
http://www.eurobot.org/fr/rules.php
Concrètement, ce qu'il faut retenir à mon avis :
- pour l'homologation, il faut prouver qu'on peut éviter le robot adverse
- Interdit aux plus de 30 ans, sauf un encadrant
- Pas de trous => Moissoneuse batteuse attendue
- Limites = 120 de périmètre, 140 cm déployé, et 35 cm de haut
- Il y aura bien 3 balises disposés en triangle isocèle
- le poster technique doit être fourni en anglais
- adieu le principe qui avait été annoncé de coopération entre les robots, celà a été proposé pour les trophées à la place
N'oubliez pas la réunion de Jeudi sur Skype à 21h.
Je vais avancer sur la partie mécanique sur Solidworks. On discutera principalement du règlement qu'on lira ensemble
dimanche, septembre 24, 2006
vendredi, septembre 22, 2006
Convertisseur DC-DC pour l'alimentation
Une idée de Julien pour gérer la carte de l'alimentation pour l'ensemble de robot :
Utiliser des Traco Power qui sont des petits boitiers DC-DC, qui coutent environ 50 € pour du 5V / 3A et 60€ pour du 5V/5A. L'avantage est que ce sont des composants industriels qui tiennent vraiment le coup.
D'autre part, Ville d'Avray utilise ces composants, ce qui est plutôt intéressant.
Eux en utilisent 3 ou 4 :
- 1 en 12V pour les capteurs
- 1 en 5V pour les servos moteurs pour éviter de perturber les micro controleurs.
- 1 dernier pour alimenter tous les micro contrôleurs.
Cela fera une carte à 150 €, mais je pense que ce sera une très bonne idée.
Utiliser des Traco Power qui sont des petits boitiers DC-DC, qui coutent environ 50 € pour du 5V / 3A et 60€ pour du 5V/5A. L'avantage est que ce sont des composants industriels qui tiennent vraiment le coup.
D'autre part, Ville d'Avray utilise ces composants, ce qui est plutôt intéressant.
Eux en utilisent 3 ou 4 :
- 1 en 12V pour les capteurs
- 1 en 5V pour les servos moteurs pour éviter de perturber les micro controleurs.
- 1 dernier pour alimenter tous les micro contrôleurs.
Cela fera une carte à 150 €, mais je pense que ce sera une très bonne idée.
lundi, septembre 18, 2006
Laser, Triangulation et Trigonométrie ...
Il y a des informations intéressantes sur l'utilisation de la trigonométrie pour les balises, même si celles si n'utilise pas toujours les lasers avec les infra rouges, il y a des idées intéressantes :
http://www.pobot.org/Balises-laser-goniometriques.html
Notamment
Il faut faire attention à ces aspects ...
Pour les calculs trigonométriques, il y a quelques infos ici :
http://f4eru.free.fr/robot/trigo.pdf
http://www.pobot.org/Balises-laser-goniometriques.html
Notamment
les lentilles proviennent d’appareils photo jetables, récupérés dans les poubelles d’un magasin Photo Service
mais surtout, la mise en oeuvre (mise en place, connexions, réglage d’attitude et calage initial des têtes) s’est avérée beaucoup trop longue et complexe pour être compatible avec le délai des 3 minutes pour la préparation du match (et de plus, cette préparation se déroulait dans le camp adverse, au risque de les déranger)
Il faut faire attention à ces aspects ...
Pour les calculs trigonométriques, il y a quelques infos ici :
http://f4eru.free.fr/robot/trigo.pdf
dimanche, septembre 10, 2006
Utilisation des profilés Bosch
Après notre réunion avec HP, celui-ci propose l'utilisation des fichiers BOSCH, qui
permettrait d'éviter les rivets, et de juste visser en dessous et au dessus. Du point de vue esthétique, c'est également nettement plus satisfaisant !!
De plus, ceux ci sont inclinés à 45° et permettrait de gérer facilement les pans du robots.
Par contre, ils ont l'inconvénient d'être lourds et de prendre de la place.
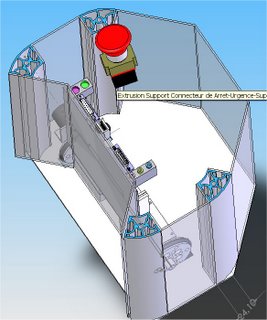
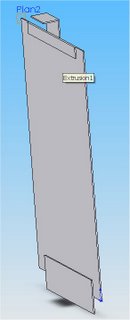
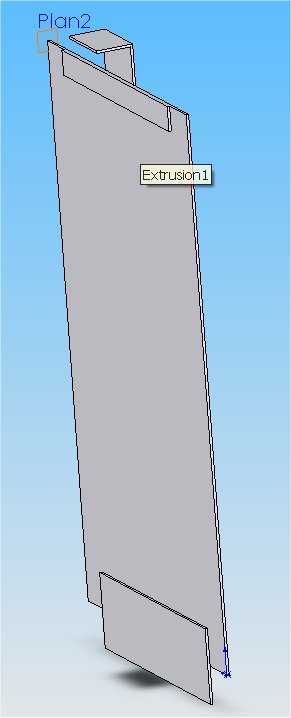
Aussi, après avoir testé avec 6 profilés Bosch, je me suis rendu compte que cela prenait de la place, et que l'espace entre les profilés n'était plus suffisant pour faire passer des cartes électroniques. Aussi, j'ai pris l'initiative de concevoir l'arrière du robot avec une plaque pliée qui prendrait l'équivalent de 3 pans, et qui serait amovible et également sur axe. Le grand avantage est qu'on dispose alors d'une grande surface pour mettre l'ensemble des cartes. Avant, avec les 3 pans, c'était pratique sauf si on voulait tirer l'ensemble des pans auquel cas il y avait des fils qui se tendait et ce n'était pas pratiques. Là, on aurait toute l'électronique à l'arrière et accessible rapidement
J'espère qu'on pourra arriver à un bon compromis entre toutes ces solutions
permettrait d'éviter les rivets, et de juste visser en dessous et au dessus. Du point de vue esthétique, c'est également nettement plus satisfaisant !!
De plus, ceux ci sont inclinés à 45° et permettrait de gérer facilement les pans du robots.
Par contre, ils ont l'inconvénient d'être lourds et de prendre de la place.
Aussi, après avoir testé avec 6 profilés Bosch, je me suis rendu compte que cela prenait de la place, et que l'espace entre les profilés n'était plus suffisant pour faire passer des cartes électroniques. Aussi, j'ai pris l'initiative de concevoir l'arrière du robot avec une plaque pliée qui prendrait l'équivalent de 3 pans, et qui serait amovible et également sur axe. Le grand avantage est qu'on dispose alors d'une grande surface pour mettre l'ensemble des cartes. Avant, avec les 3 pans, c'était pratique sauf si on voulait tirer l'ensemble des pans auquel cas il y avait des fils qui se tendait et ce n'était pas pratiques. Là, on aurait toute l'électronique à l'arrière et accessible rapidement
J'espère qu'on pourra arriver à un bon compromis entre toutes ces solutions

jeudi, septembre 07, 2006
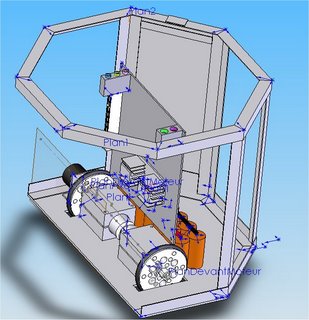
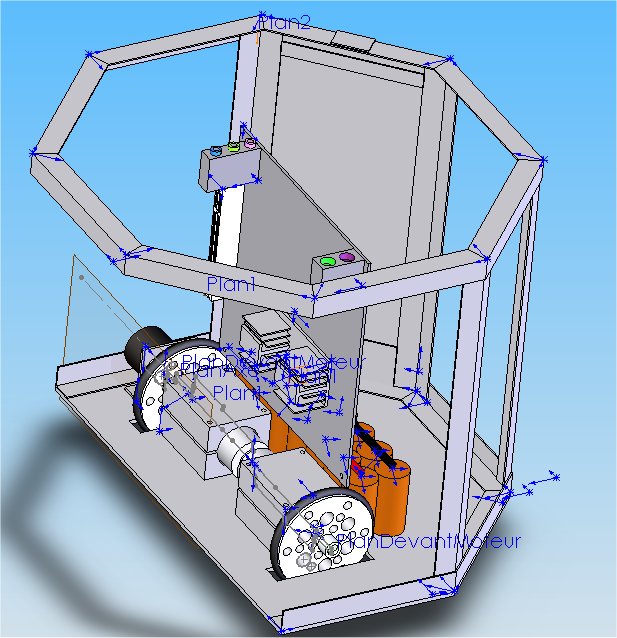
Première ébauche de la modélisation du robot
Conformément à notre réunion téléphonique du mardi 5 septembre, voici quelques images sous Solidworks 2006 du robot de l'association.
Je fais le point avec Henri Pierre pour faire évoluer le modèle rapidement et atteindre une solution finale
Voici un exemple

Je fais le point avec Henri Pierre pour faire évoluer le modèle rapidement et atteindre une solution finale
Voici un exemple

Inscription à :
Commentaires (Atom)